Esta investigación sustentada por Gerardo Vilcahuamán tuvo como objetivo diseñar un sistema programado para localización.
Por Javier Paico. 01 abril, 2013. La tesis “Diseño e implementación de un sistema de navegación autónomo basado en el filtro extendido de Kalman en el módulo robótico CoroBot empleando lenguaje C”, fue sustentada por Gerardo Arturo Vilcahuamán Espinoza, egresado del programa académico de Ingeniería Mecánico Eléctrica.
La tesis “Diseño e implementación de un sistema de navegación autónomo basado en el filtro extendido de Kalman en el módulo robótico CoroBot empleando lenguaje C”, fue sustentada por Gerardo Arturo Vilcahuamán Espinoza, egresado del programa académico de Ingeniería Mecánico Eléctrica.
El objetivo de la investigación fue implementar un sistema programado para localización basado en el filtro extendido de Kalman. La importancia de la investigación radica, entre otras cosas, porque la utilización de robots está ampliamente extendida en todo tipo de fábricas y empresas industriales, obteniendo con ellos reducción de costos, aumento de la productividad, mejora de la calidad en la producción y eliminación de condiciones peligrosas de trabajo o mejora de las mismas.
Asimismo, el tesista diseñó un sistema programado para planificación de trayectorias basado en una función de costo, con previo conocimiento del entorno. Además, se identificó las potencialidades y deficiencias del Corobot, como una unidad móvil para navegación en espacios confinados, tanto en hardware como en software.
Para tal fin, Gerardo Vilcahuamán realizó un estudio sobre el estado del arte de las metodologías empleadas en robots móviles y revisó los conocimientos previos desarrollados en el CoroBot. Así también, investigó el método probabilístico y arquitectura a emplear, y desarrolló algoritmos y pruebas.
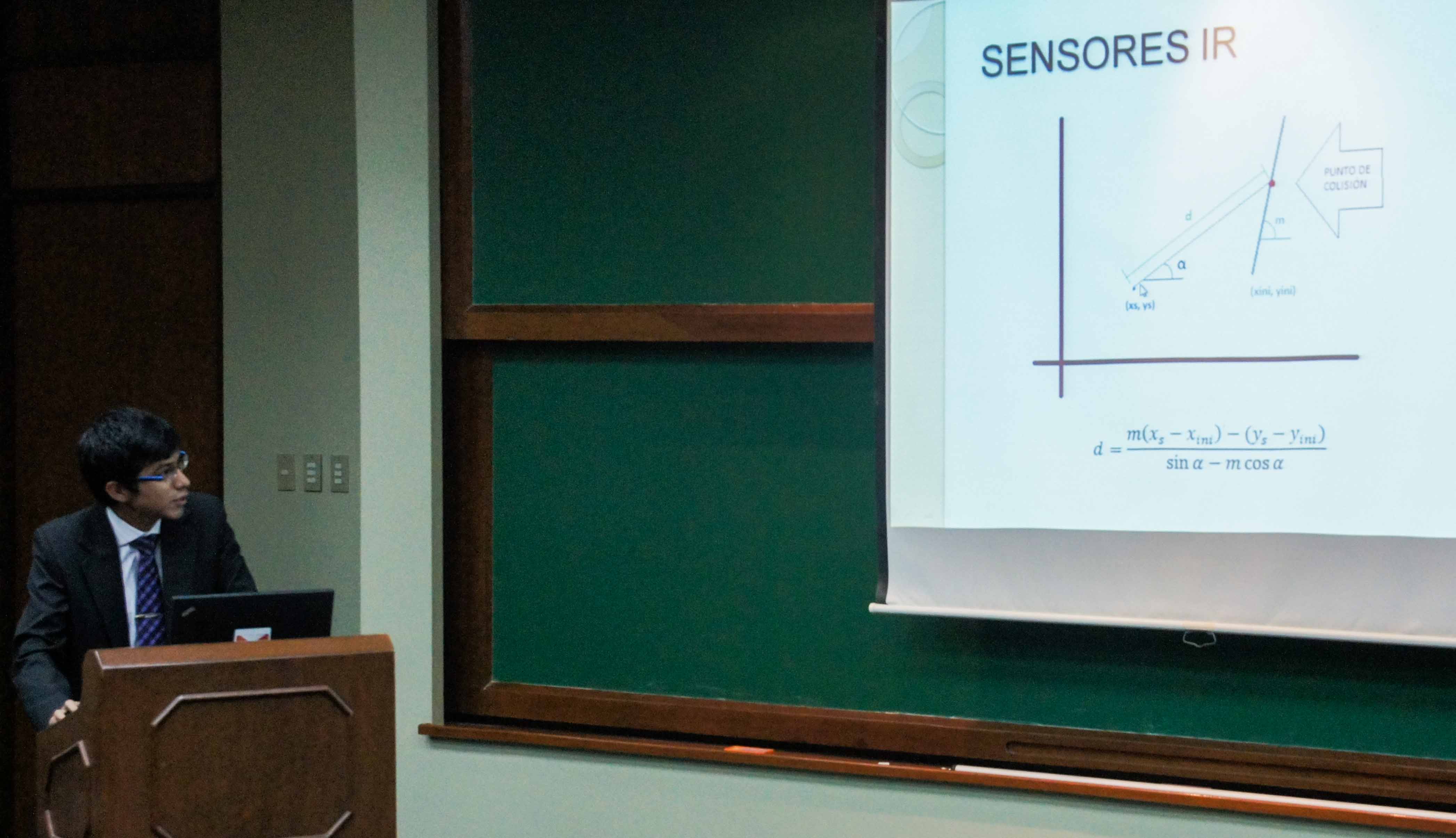
Después de las investigaciones realizadas, la tesis concluyó que es factible la implementación del sistema de navegación, con capacidades de localización y planificación de trayectorias, en el CoroBot. Se recomendó implementar otra estructura de locomoción en la unidad; instalar sensores de distancia de diversos tipos: infrarrojos, ultrasonidos, etc., y probar otras metodologías de mayor carga computacional, para resolver problemas más complejos de navegación robótica.
También hay que señalar que los robots móviles se encuentran también en el ámbito militar, en los entornos de seguridad y son el foco de una gran cantidad de investigaciones en curso, casi todas las universidades cuenta con laboratorios que se centran en los estudios de estos dispositivos.
El jurado de la sustentación estuvo conformado por: el Dr. Edilberto Vásquez Díaz; el Dr. Miguel Castro Sánchez y el Dr. Justo Oquelis Cabredo